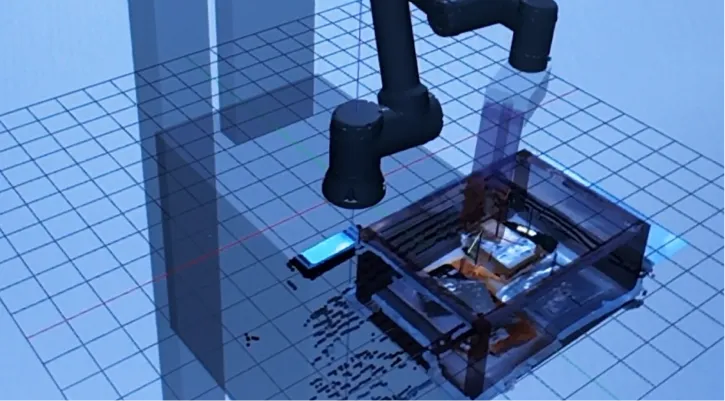
3Dピッキング
AIビジョンを活用


バラ積みピッキングの事例
シンプルな設定で、主要ロボットに統合。
Eureka AI ビジョンシステムで、ビジョンロボットはあらゆるエンジニアに身近なものに。
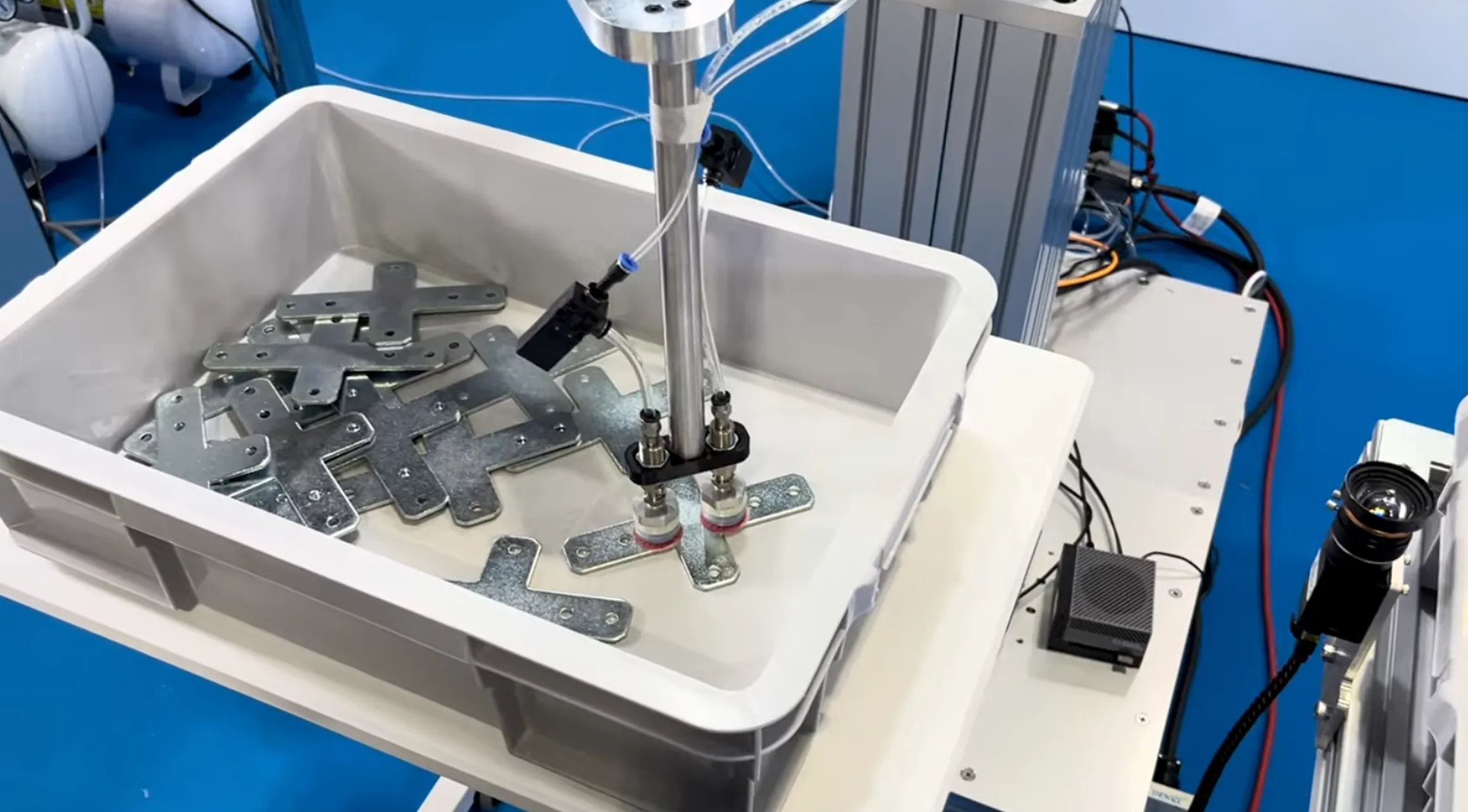
金属部品のバラ積みピッキングと整列

複雑形状部品のバラ積みピッキング
マスターレスピッキング
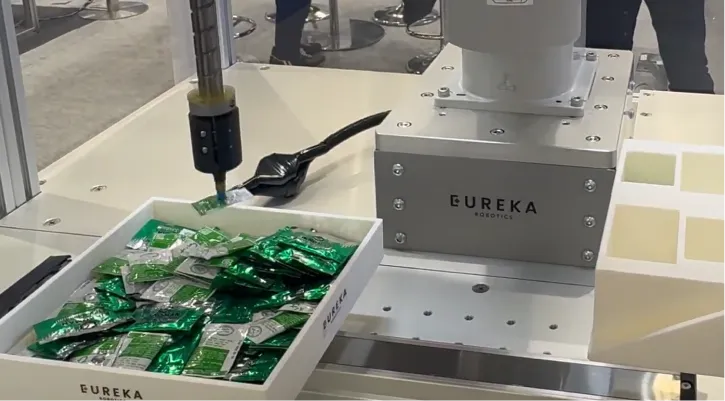
高速バラ積みピック
オペレータが担当する4種の作業を、AIビジョンで自動化
ピッキング
コンテナ、通い箱、コンベアからの取出しに対応。事前に整列や、位置決めの治具は不要です。
積み付け
ランダム供給のワークを、パレット、トレイ、緩衝材へ正確に積載します。
仕分け
混載コンベア上の100種類以上のSKUを認識し、それぞれを正しい行き先へ振り分けます。
投入
CNCやプレス機、後工程の機械へ、オペレータ無しでワークを供給します。
ついに、費用対効果に見合う
3Dピッキングを実現
これまでのAIビジョン案件は、コストで頓挫してきました。評価のコスト、導入
コスト、保守のコスト。Eurekaはこの3つのコストをすべてを解消します。



ワークをお送りください。迅速に評価します。
右記のフォームに、ご所望のアプリケーションをお知らせください。内容確認後、迅速にEurekaからご連絡いたします。
*内容によっては、無料でご対応しかねるケースがございます。その際は、テストを開始する前にご連絡いたします。
ワークテスト申込
対応可否を検証するために、
アプリケーションの詳細を
お知らせください。
ワーク発送
お申込みを受信後、弊社から迅速にご連絡します。その後、ワークをご発送ください。
Eurekaより動画をご送付
ピッキング可能であることを確認後、お預かりしたワークをピックする動画をお送りします。
画像処理の疑問を解決
Eurekaのアプリケーションエンジニアとビジョンエキスパートによる実践的なアドバイス

よくあるご質問
バラ積みピッキングに向くワークと向かないワークは?
マット仕上げの表面、シンプルな形状、吸着パッドが密着できる平面があるワークが理想的です。容器に対して大きく、置き先がバラ置きのワークが最も導入しやすいです。
光沢金属、透明・暗色素材、不規則な形状、高密度な配置、そして厳しい配置公差。これらはすべて自動化の難易度を上げる要因となります。現時点では、純粋なガラスのような完全な透明体への対応は困難ですが、半透明のワークであれば、難易度は高いものの対応可能なケースが多くあります。
最も早く判断する方法は、ワークをお送りいただくことです。無料のワークテストを実施します。実現可能性の詳細な解説はバラ積みピッキング実践ガイドをご覧ください。
本番稼働でのピック成功率とサイクルタイムの目安は?
一般的な生産セルでは、**サイクルタイム4〜8秒、ピック成功率98〜99.9%**を達成しています。例えば、吸着パッドでピッキングしてバルク(バラ積み)配置するようなシンプルな部品であれば、約5秒で稼働します。一方で、フィンガーグリッパで正確な位置決めが必要な複雑な部品の場合は、7〜8秒ほどかかります。セルの設計次第で、速度はさらに変わります。
・固定カメラ: ロボットハンド装着カメラより 1〜2秒高速
・吸着パッド: メカニカルグリッパ(指状)より 1〜2秒高速
・産業用ロボット: 協働ロボットより 3〜4秒高速
もし「導入してすぐに成功率100%」を謳うメーカーがあれば、少し慎重に見極める必要があります。稼働後のチューニング期間をあらかじめ考慮し、デモ環境ではなく、実際の生産現場の現実に即した受入基準を設定することをおすすめします。
詳細はバラ積みピック完全ガイドをご覧ください。
立ち上げから本番稼働までの期間は?
オフサイトでの準備(モデル学習、アプリケーションロジック、初期チューニング)に1〜2週間、現地での設置と立ち上げに数日から2週間程度です。午後のうちに最初のピックを実現するのは現実的です。安定した本番稼働に到達するにはさらに時間がかかります。
最も過小評価されがちなのは、テスト、エッジケースのトラブルシューティング、現地での細かなチューニングです。エンジニアリング工数の大半はここに費やされます。
システムインテグレータは必要ですか、それともEurekaと直接やり取りできますか?
貴社内に、機械・電気・ソフトウェアのすべてに対応できる強力な社内エンジニアリングチームがない限り、システムインテグレータ(SIer)様に入っていただくことをお勧めします。Eurekaは、3Dカメラ、AIビジョンソフトウェア、およびアプリケーション設計のサポートを提供しますが、設備全体のトータルなインテグレーション(エンドツーエンドの構築)は行っておりません。
プロジェクトを成功に導くのは、次の3つのチームによる連携です。
・Eureka: 画像処理(ビジョン)とソフトウェアを担当
・SIer : 機械・電気設計とシステム構築を担当
・貴社チーム: 生産現場のノウハウの提供、およびプロジェクトの統括を担当
ご依頼予定のSIer様がバラ積みピッキングは未経験であってもご安心ください。私たちが立ち上げを全面的にバックアップします。
運用開始後にSKU(品目)を追加するには?コストはどのくらいですか?
新部品の追加をすべてベンダーに依存するシステムは、時間の経過とともに対処費用が膨らみ、ベンダー離れができなくなります。しかし、Eurekaのシステムなら、お客様ご自身で新しいSKUの学習・登録を行うことが可能です。部品の複雑さによって、追加にかかる時間は数分から数日と異なりますが、スケジュールもコストもすべてお客様自身でコントロールできます。これには、導入時にお客様の社内エンジニアを学習・登録作業の担当として割り当てていただく必要があります。しかし、扱うSKUの数が増えれば増えるほど、この投資は確実に回収できます。AIが部品の個体差やバリエーションにどう対応しているかについての詳細は、記事「バラ積みピッキングにおける機械学習の価値」をご覧ください。
自社のワークでバラ積みピックが可能かを試す最良の方法は?
実物のワークを使った当社ラボでのピッキングデモです。実機を使った検証は、最もコストを抑えられる初期の段階で、予期せぬ課題を浮き彫りにしてくれます。このデモでは、自動化における2大リスクである「ビジョンがワークを正確に認識できるか」と「ロボットが確実に掴めるか」を検証します。
無料のワークテストをお申込みください。実現可能性について率直にお答えします。
バラ積みピッキングとは?
バラ積みピッキング(ビンピッキング)とは、3DビジョンとAIを搭載したロボットが、容器の中にランダムに配置された部品を一つひとつ掴み取る技術です。製造現場において、部品が整列されずにバラ積みの状態で届く工程の、手作業による投入・供給作業を自動化します。システム全体は、3Dカメラ、ロボットアーム、部品認識と掴み位置を計画するAIソフトウェア、エンドエフェクタ(ハンド)、そして機械・電気・安全柵などの周辺インフラで構成されています。最新のシステムでは、実際の生産現場でサイクルタイム4〜8秒、ピック成功率98%以上を達成しています。詳細は、「バラ積みピック入門ガイド」をご覧ください。